µMACC
MicroMACC (µMACC: Motion Automation Control [micro-] Card) is a compact and low cost controller interface for up to 6 (optionally more) axes of servo- or stepper drives with step/dir (pulse/dir) commands. MicroMACC interfaces with any Click&Move (C&M) user created application – running on a Windows PC – via RS232, RS485, USB or Ethernet ports.

Fully functional Click&Move IDE (Integrated Development Environment) is free to download (non-registered version) from the manufacturer’s website.
The running C&M application calculates Position and Velocity points in Time (PVT) of the commanded motion, then these commands are forwarded to the µMACC card. Here the PVT points are interpolated and converted into coordinated multi-axis step/dir signals. All motion parameters are set and configured by the user application, or they can be set on the fully featured HMI screen as well. C&M user application is created in the Click&Move – function block based, graphical – development enviropnment, conforming to the www.PLCopen.org specifications. C&M offers nice graphical HMI editor/runtime system as well, on a simple Windows computer screen. All computing resources (including the memory) of the PC are available to the programmer in the powerful C&M development-, as well as in the runtime environment.
Using the latest generation 32-bit Risc processor engine and Field Programmable Gate Array (FPGA) circuits, µMACC offers high speed and flexible user programmable motion controller. The C&M IDE is used to create applications. On board buffering is utilized to overcome the non-real time nature of the Windows OS. Stand alone versions with hard real time capability are also available from the manufacturer.
Separate CAN channel connection (RJ45) is available on the MicroMACC board that enables the user to mix and match AMC networked servo drives with third party step/dir servo- or stepper drives. (E.g. X, Y, Z axes can be AMC networked servos and A, B, C axes can be third party step/dir drives.)
The Micro-MACC can also serve as an intelligent I/O module with I/Os synchronized to motion. The on board I/Os can be further expanded with CANopen devices conforming to the standard DS401 I/O profile, or a dedicated hardware I/O extension board.
Application specific pre-programmed MicroMACC versions are available for OEM-s. High speed hard real-time applications (e.g. servo loops, data acquisition etc.) can also be implemented in the user programmable MicroMACC version.
Features
- IEC-61131-3 conformity
- PLCopen function block library based program structure
- Additional user specific function blocks with C++ programming
- Virtual develoment environment
- Motion and automation controls
- Low cost yet sophisticated applications
- Click&Move® Integrated Development Environment
- Mixed step/dir and AMC CANopen servo drive operations
Specifications
- 32-bit 160MHz Risc Processor
- 256KByte zero wait state SRAM for data
- 2MByte FLASH for firmware and user program storage
- 4kByte EEPROM for non-volatile parameter storage
- Supports 6 axes of stepper, or 6 axes of servo in step and direction mode
- 24 uncommitted non-isolated digital inputs Programmable for hardware limits, home input, stop input and error input. 6 of the inputs can be programmed for high-speed capture of position with 1 microsecond.
- 16 uncommitted digital outputs. 5V open collector Darlington Programmable for drive enable and high speed position compare output
- 24V/150mA relay output to signal system error conditions
- Optional 2 x 3 simultaneously sampled 12-bit uncommitted analog inputs
- Optional 2 x 12-bit uncommitted analog outputs
- RS232 (115,200 Baud), 10/100Mbit Ethernet (via UDP/IP) and USB programming interfaces USB drivers compatible with Windows 2000/XP and Linux Optional RS485 serial port
- Optional 2 x CAN interfaces for I/O expansion and HMI interfaces. Can be used to provide full peer-to-peer networking capabilities with other controllers
- Comprehensive move types including: linear, circular and helical interpolation; software cams; 3D shape cutting; flying shears; splines; synchronization with positional offsets and virtual axes via the PC based C&M (Click and Move) motion controller application.
Programozási példa
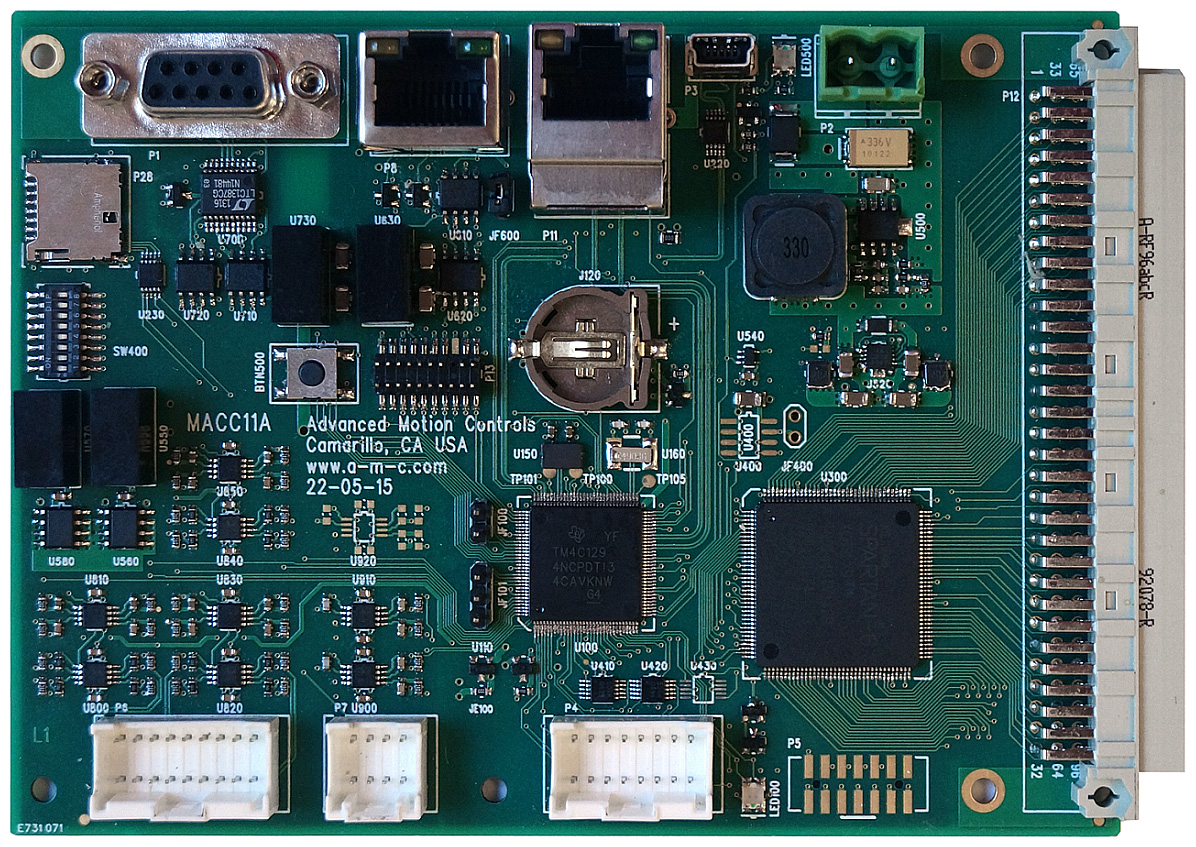
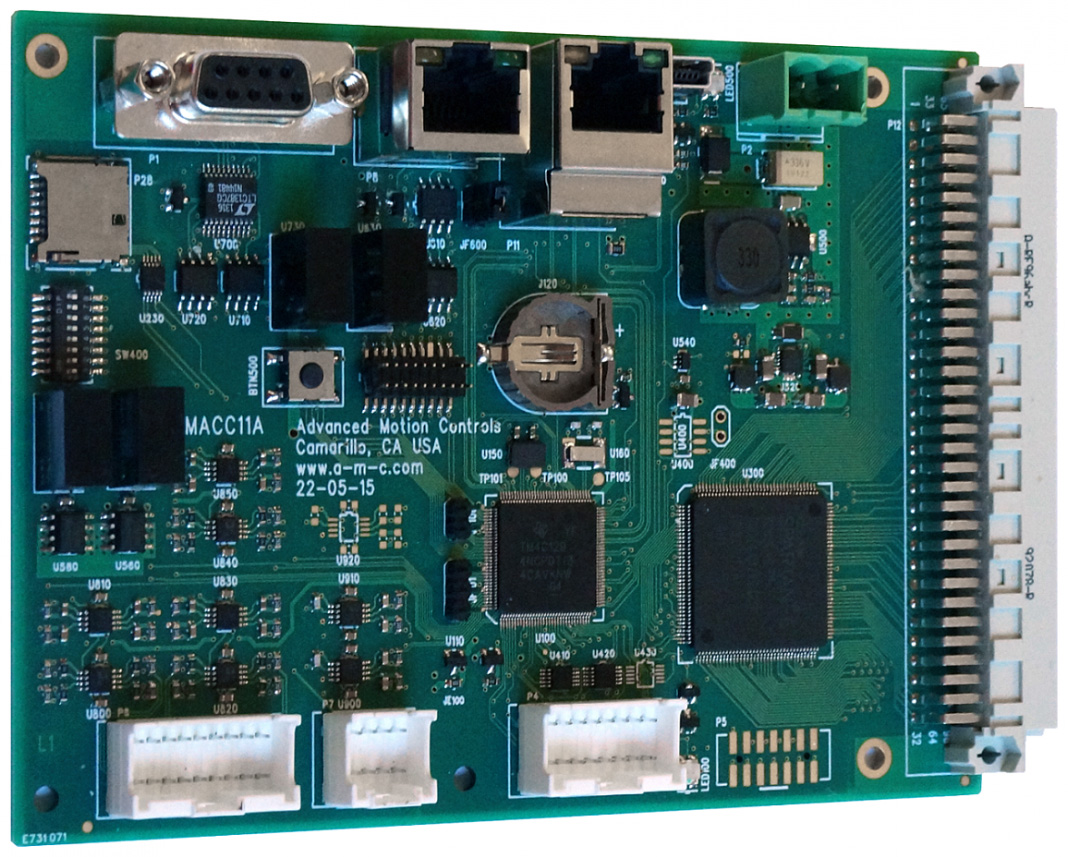
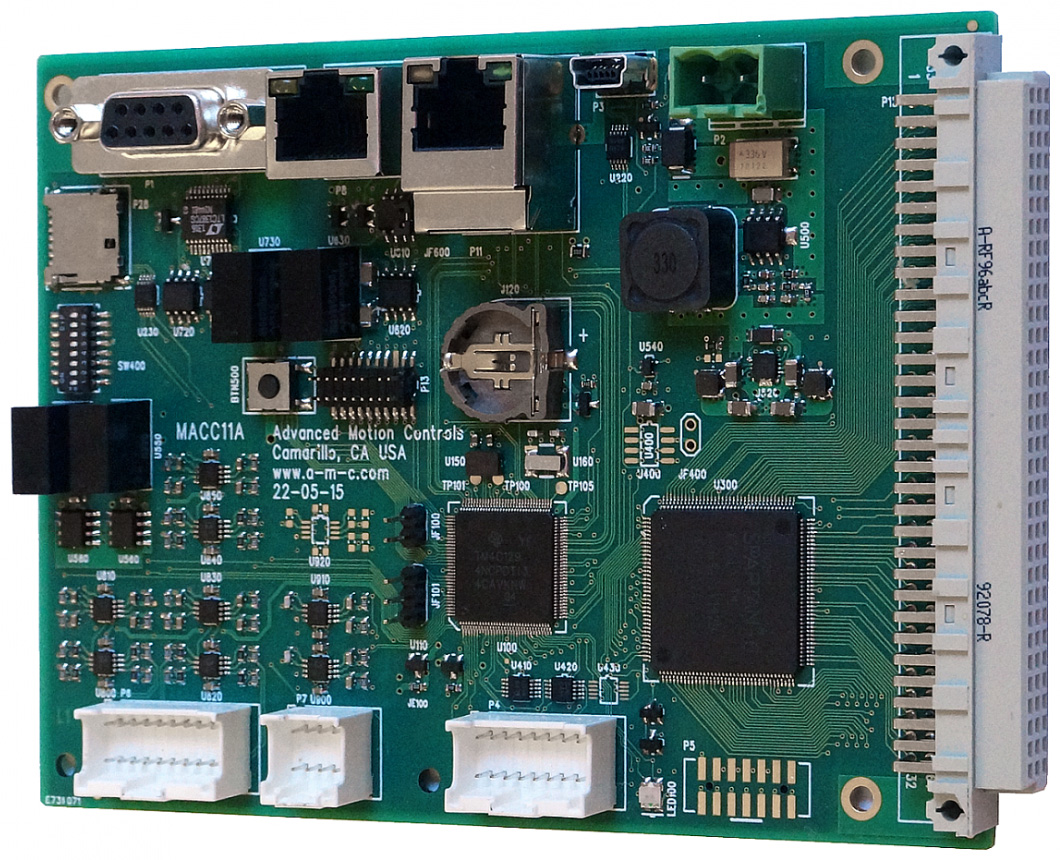
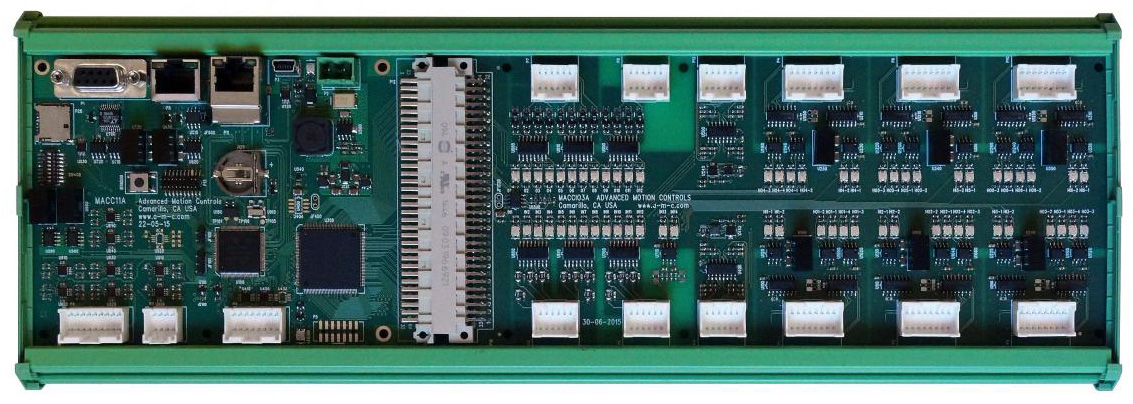
Fényképek